

Vraagstelling
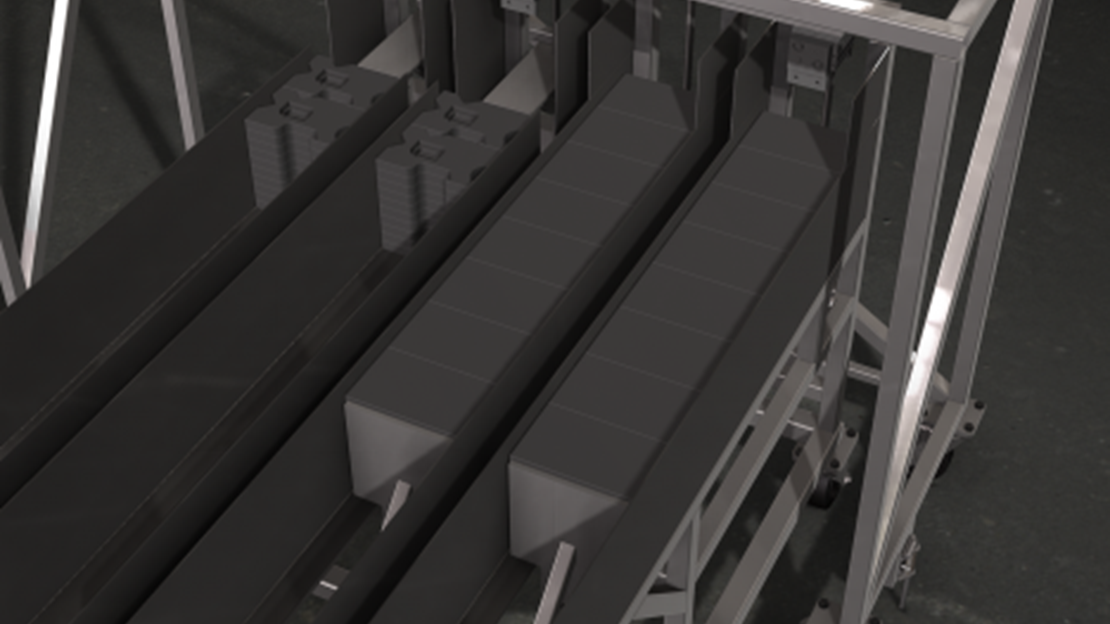
De computergestuurde freesmachine (CNC freesmachine) in het Technopark in HR moet beter benut worden. De freesmachine wordt gebruikt om eenvoudige aluminium producten te maken. De opdracht is een robotarm te ontwerpen die op een efficiënte manier de freesmachine laadt en lost. De gestelde eisen zijn: de gehele robotarm moet inklapbaar/verrijdbaar zijn zodat het onderwijs er geen last van heeft; de beschikbare ruimte is 4 vierkante meter; er zijn maximaal een half uur per dag aaneengesloten handmatige werkzaamheden. Het halffabrikaat is een stuk aluminium van 156 x 96 x 15,5 mm.
Aanpak
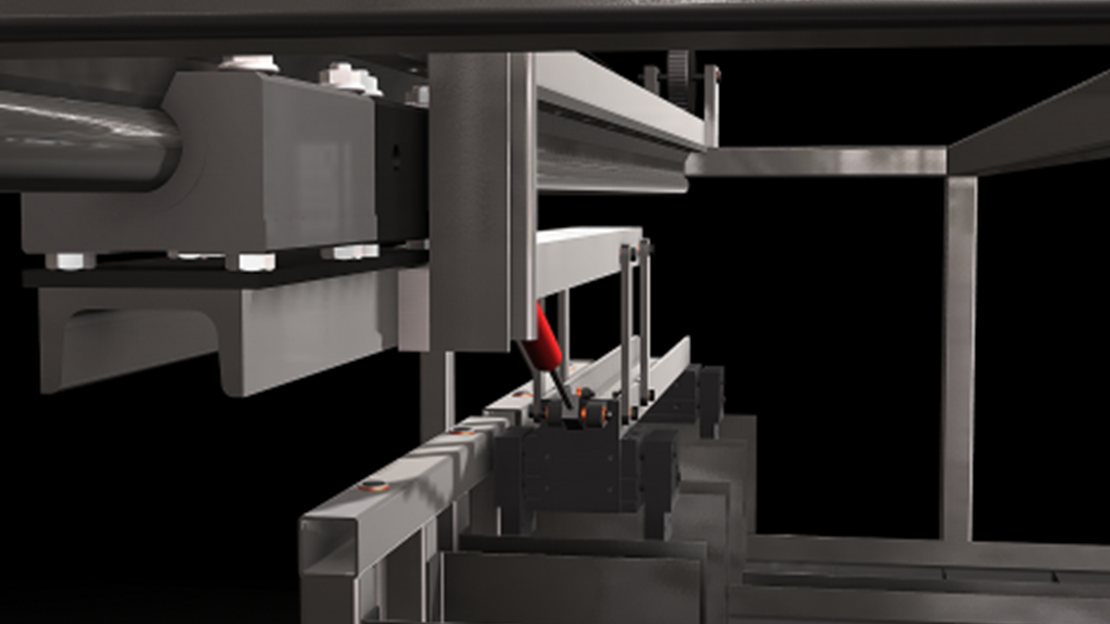
Om tot het beoogde resultaat te komen zijn de volgende stappen ondernomen: allereerst is er gekeken wat er al op de markt is. Daarna zijn er verschillende voorontwerpen gemaakt waaruit er één gekozen is. Dit gekozen ontwerp is verder uitgewerkt tot het detailontwerp. Het uitwerken hiervan omvat het berekenen van de verschillende constructiedelen, overbrengingen met de bijbehorende aandrijvingen en het tekenen. Het tekenen omvat onder andere het maken van werktekeningen en samenstellingstekeningen zodat het ontwerp echt gemaakt kan worden.
Resultaat
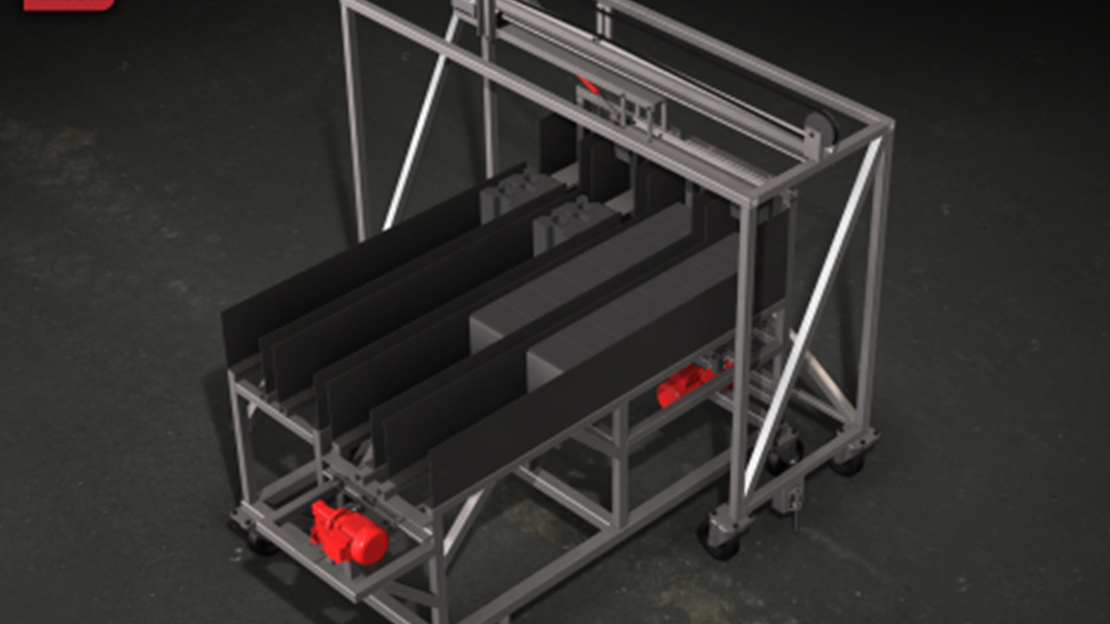
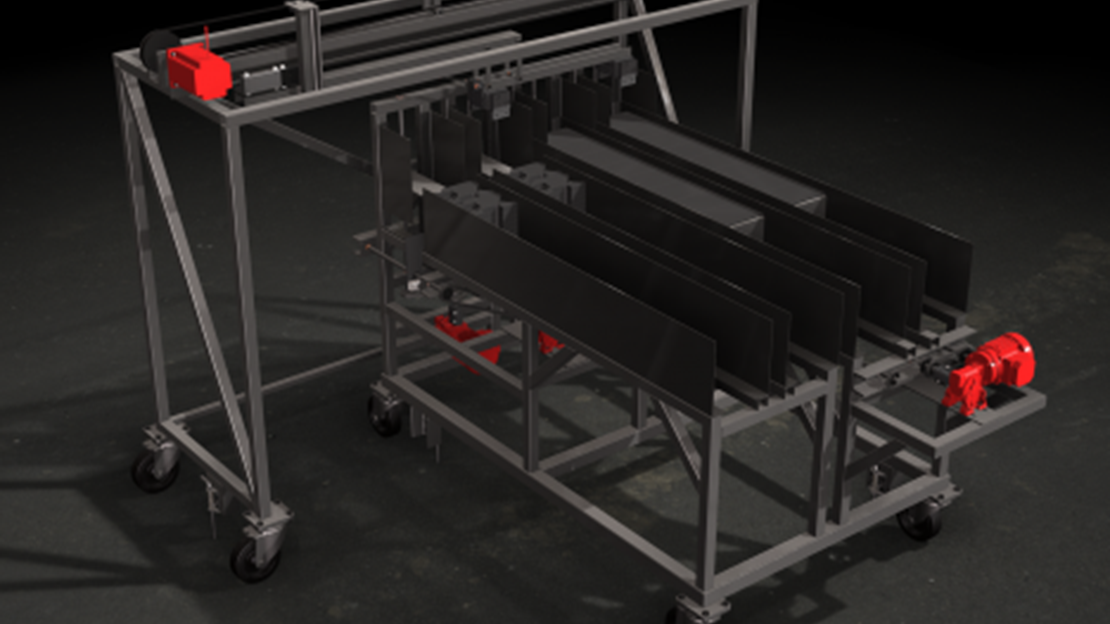
Het resultaat is een op maatgemaakte robotarm die de freesmachine optimaal kan laden en lossen voor de laagst mogelijke prijs. Door zoveel mogelijk gebruikt te maken van dezelfde of standaard onderdelen zijn de kosten laag gebleven. Ook voldoet de robotarm aan alle gestelde eisen van de opdrachtgever. Zo is het bijvoorbeeld eenvoudig verrijdbaar en vast te zetten in het geval de freesmachine voor onderwijs gebruikt wordt. Bovendien heeft het een groot magazijn zodat het lange tijd door kan gaan zonder dat het magazijn bijgevuld moet worden.
Opleiding(en)
- Werktuigbouwkunde
Type
Project
Aan dit project werkten mee
Lennard Hoek